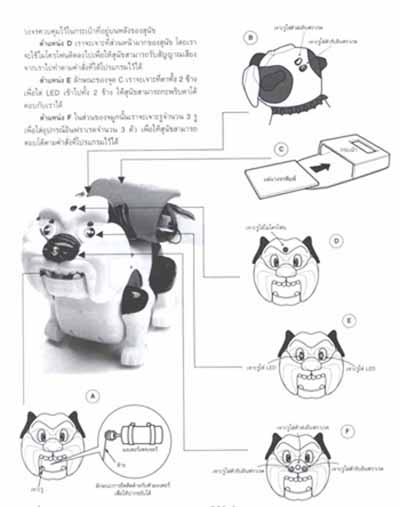
 รูปที่ 1 โครงสร้างของหุ่นยนต์สุนัขและตำแหน่งเจาะรูและกระเป๋าใส่แผ่นวงจร
รูปที่ 1 โครงสร้างของหุ่นยนต์สุนัขและตำแหน่งเจาะรูและกระเป๋าใส่แผ่นวงจร
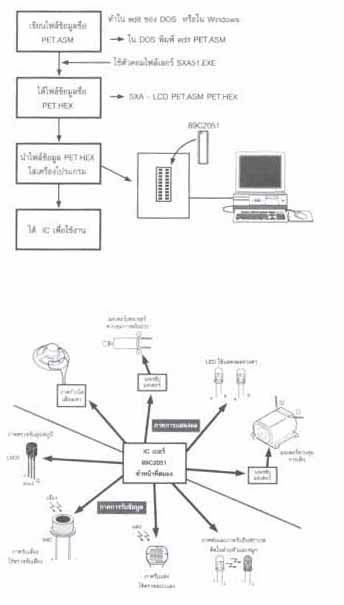
รูปที่ 3 วิธีการโปรแกรมข้อมูล
รูปที่ 4 บล๊อกไดอะแกรมระบบการทำงานทั้งหมด
|
 |
ระบบการทำงานหลักของสมอง
ในระบบการทำงานของสมอง เราจะใช้ตัวประมวลผลอะไรก็ได้แล้วแต่ที่เราจะถนัด
ในที่นี้ผมขอหยิบตัวประมวลผลซึ่งเรียกว่าตัวไมโครคอนโทรลเลอร์
เบอร์ 89C2051 ซึ่งเรียกง่าย ๆ ว่าเป็นสมองพร้อมประสาทสัมผัสขนาดเล็ก
ๆ ซึ่งก็เพียงพอกับระบบที่เราออกแบบซึ่งไมโครคอนโทรลเลอร์ตัวนี้ก่อนที่ผมจะนำมาทำงานก็เข้ารับการอบรมจากหนังสือที่บ้านอยู่ช่วงหนึ่ง
จึงได้นำมาใช้งานได้ ซึ่งผมคิดว่าไม่น่าจะยากเกินกว่าที่นักอิเล็กทรอนิกส์อย่าง
เรา ๆ จะทำการศึกษากันนะครับ
ในการทำงานช่วงแรก ๆ ผมขอให้ท่านผู้อ่านมองไมโครคอนโทรลเลอร์เบอร์นี้เป็นไอซีตัวหนึ่งเสียก่อนที่ได้รับการออกแบบมาให้ใช้กับงานต่าง
ๆ ซึ่งไอซีเบอร์นี้จะมีการรับประสาทสัมผัสต่าง ๆ และสามารถสั่งงานออกทางการกระทำต่าง
ๆ ได้ตามที่เราออกแบบไว้
ระบบที่เราได้ออกแบบต้องมีภาครับข้อมูลแและภาคแสดงผล ซึ่งการออกแบบต้องคำนึงถึงตัวของไอซีเบอร์
89C2051 ด้วยว่าต้องการใช้งานอะไรเมื่ออยู่ในภาคแสดงผลและต้องการอะไรเมื่อได้รับข้อมูล
ก่อนเข้าเรื่องจะขอกล่าวถึง ไอซีเบอร์นี้เสียก่อนคือ ไอซีเบอร์นี้จะอยู่ในตระกูลของ
MCS51 เบอร์ที่ใช้นี้จะเป็นเบอร์ของบริษัท ATMEL โดยจะขึ้นต้นด้วย
89Cxxxx ซึ่งเบอร์ที่ใช้ในงานนี้คือ เบอร์ 89C2051 เป็นตัวขนาดเล็กมีขาเพียง
20 ขา สามารถใส่ข้อมูลหรือคำสั่งของเราได้ความยาว 2K Bytes มีหน่วยความาจำชั่วคราว
128 x 8 Bit สามารถขับ LED ได้ 15 หลอด หรือรับข้อมูลได้ 15 จุด
ซึ่งการเขียนข้อมูลลงไปใน ไอซี จะต้องมีคอมพิวเตอร์พร้อมตัวเขียนโปรแกรม
เราสามารถหาซื้อตัวเขียนโปรแกรมได้จากร้านพัฒนา บอร์ดควบคุมต่าง
ๆ ต่อจากนี้ผมจะขอนำเสนอ วิธีการโปรแกรมข้อมูลลงในไอซีดังนี้ |
| |
|
|
หมายเหตุ
: ส่วนของเครื่องโปรแกรมบางตัว เมื่อได้ไฟล์ข้อมูล PET.HEX แล้วยังไม่สามารถเขียนข้อมูลลงไปในตัวไอซีได้ต้องมีการแปลงเป็น
PET.HX2 เสียก่อน โดยการใช้โปรแกรมการแปลง HEX2 HEX
ซึ่งในขั้นตอนการโปรแกรม ไอซีเบอร์นี้จะเป็นดังบล็อกไดอะแกรม
จะได้ไอซีที่ใช้เฉพาะงานออกมา จำนวน 1 ตัว ซึ่งหมายถึงว่าเราต้องออกแบบวงจรสำหรับไอซีตัวนี้เรียบร้อยแล้วเสมือนกับว่า
ต้องออกแบบระบบโครงสร้างของหุ่นยนต์เสร็จเรียบร้อยก่อนแล้ว จึงใส่สมองนั่นเอง |
| |
|
|
| |
|
มีต่อ...  |

