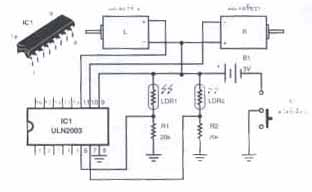
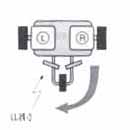
หลักการทำงาน ในโครงงานนี้เราจะใช้ตัวตรวจจับแสง LDR ซึ่งตัว LDR นี้มีคุณสมบัติคือ เมื่อมีแสงมาตกกระทบมันค่าความต้านทานภายในจะลดลงมากหรือน้อยขึ้นอยู่กับแสงที่ให้ แต่ถ้าไม่มีแสงและมืดมากๆค่าความต้านทานของ LDR ก็จะมีค่ามากด้วยดังรูปที่ 4 วงจรการทำงานดังในรูปที่ 4 ซึ่งมีลักษณะการทำงานดังนี้ กรณีที่ 1 เมื่อมีแสงฉายเข้ามาที่ LDR1 และ LDR2 ข้างซ้ายและขวาเท่า ๆ กัน จะทำให้แรงดันตกคร่อม R ค่า 20 กิโลโอห์ม ทั้งสองตัวเพิ่มขึ้นเป็นประมาณ 2.4 โวลต์ หรือมากกว่าซึ่งจะทำให้ขา 6 และขา 7 ของ IC1 เบอร์ ULN2003 เป็นลอกจิกสูง ซึ่งไอซีตัวนี้ทำหน้าที่เสมือนนอตเกต ซึ่งจะทำให้ขา 10 และขา 11 เป็นลอจิกต่ำ และมีแรงดันไฟบวกรอที่ขามอเตอร์อยู่แล้ว จะวิ่งผ่านขดลวดของมอเตอร์ทั้งสองลงกราวด์ที่เป็นตัวรับกระแส จึงทำให้มอเตอร์ทั้งสองหมุนพร้อมกัน ทำให้หุ่นยนต์ของเราวิ่งเข้าหาแสงทันที กรณีที่ 2 ถ้า LDR างด้านซ้ายได้รับแสงเพียงข้างเดียว จะเกิดลอจิกสูงที่ขา 7 ของไอซี ซึ่งจะทำให้มอเตอร์ขวาทำงานทันที เมื่อมอเตอร์ขวาทำงาน จะเคลื่อนที่เอา LDR ทางขวาซี่งไม่ได้รับแสงมารับแสงทันที จึงทำให้สามารถที่จะรับแสงได้เท่ากันและวิ่งเข้าหาแสงได้ กรณีที่ 3 ถ้า LDR ทางด้านขวาได้รับแสงเพียงข้างเดียวก็จะเกิดลอจิกสูงที่ขา 6 ของไอซี จึงทำให้มอเตอร์ซ้ายทำงานทันทีและจะเคลื่อนที่เอา LDR ทางซ้ายมารับแสงจึงทำให้ได้รับแสงเท่ากันและวิ่งเข้าหาแสงได้ดังรูปที่ 6 และรูปที่ 7
ออกแบบและจัดทำโดย :: BASICLITE.COM Email: basic@basiclite.com สายตรง