ในบล็อกวงจรขับมอเตอร์นี้เป็นวงจรที่เราได้ใช้
ไอซีสำเร็จรูปเบอร์ L293B ของบริษัท ST ซึ่งเป็นไอซีที่สามารถควบคุมมอเตอร์ได้อย่างอิสระและกลับทิศทางได้พร้อมกัน
2 ตัว ซึ่งเหมาะมากกับวงจรที่ต้องการน้ำหนักที่เบาและขนาดเล็ก ในการควบคุมทิศทางของมอเตอร์จะถูกควบคุมจากหน่วยควบคุมหลักผ่านวงจรขับมอเตอร์นี้ครับ
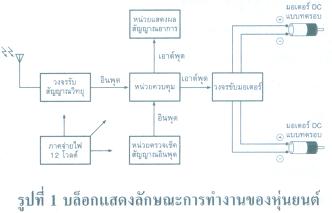
ในบล็อกภาคจ่ายไฟ เป็นส่วนการทำงานที่ใช้เป็นพลังงานของระบบขับเคลื่อนตัวหุ่นยนต์โดยจะใช้ไฟกระแสตรง
(ดีซี) ในย่าน 12- 18 โวลท์โดยเราจะนำ ไฟที่ได้มาแบ่งออกเป็นสองส่วนคือส่วนที่
1 จะเป็นส่วนของภาคควบคุม จะใช้กำลังไฟ 4.5 โวลท์ และส่วนที่ 2 จะเป็นส่วนขับมอเตอร์ซึ่งจะใช้ไฟ
12 – 18 โวลท์ |