หุ่นยนต์เคลื่อนที่อย่างไร จากนิตยสาร
Hobby Electronics ปีที่ 11 ฉบับที่ 123 ก.ย.. 2545
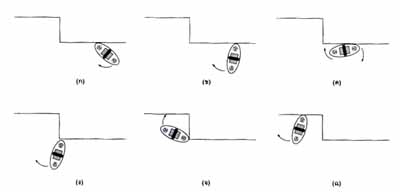
เรามาดูการทำงานของตัวหุ่นยนต์ก่อนนะครับว่าจะทำงานได้อย่างไรในรูปทรงที่แปลก
ๆ ดูในรูปที่ 1 จะเห็นว่าหุ่นยนต์เคลื่อนที่ไปในลักษณะหมุนตัวตามขอบผนังที่ขวางกั้น
เรามาเจาะลึกถึงประเด็นของการทำงานเลยดีกว่าครับ
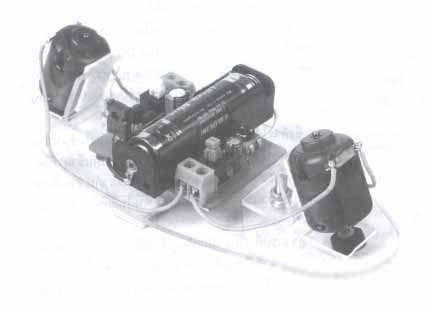
ในตัวหุ่นยนต์จะประกอบด้วยมอเตอร์ไฟตรง
2 ตัว (ใช้มอเตอร์ DC ทั่วไปหาได้จากร้านขายรถแข่ง รถกระป๋อง)
โดยที่แกนของมอเตอร์จะใส่ล้อซึ่งทำจากลูกยางเทป หุ่นยนต์ตัวนี้สามารถที่จะวิ่งหาทางออกจากสิ่งกีดหขวางเช่นเขาวงกตได้เองหรือบริเวณใด
ๆ ก็ได้ที่มีขอบทางให้หุ่นยนต์สามารถวิ่งได้
มอเตอร์จะถูกติดตั้งที่ส่วนท้ายทั้ง
2 ด้าน เมื่อเราเปิดสวิตซ์เริ่มเดินในรูปที่ 1(ก) มอเตอร์ตัวที่
1 จะหยุดทำงานเพระาขอบท้ายของตัวหุ่นยนต์ติดกับขอบผนัง จึงทำให้มีแรงขับเคลื่อนสูงสู่มอเตอร์ตัวที่
2 ที่เป็นอิสระ ทำให้มอเตอร์ 2 ทำงานเพียงตัวเดียวในขณะนั้น
เมื่อมอเตอร์ตัวที่ 2
ทำงาน จะผลักในส่วนท้ายที่ 2 ของหุ่นยนต์ทำให้เกิดแรงเหวี่ยงไปตามทิศทางของลูกศรและมอเตอร์
2 จะวิ่งไปจนเกือบจะถึงกำแพง ดังรูปที่1
(ข) มอเตอร์ 1 จะเป็นอิสระจากการหมุนของมอเตอร์
2 ทำให้หุ่นยนต์ถึงขอบกำแพงเร็วขึ้น และก็จะกลับสู่รูปแบบเดิม
คือ มอเตอร์ตัวที่ 2 จะหยุด ทำให้กิดแรงหมุนของมอเตอร์ 1 ที่รุนแรงจึงเกิดการเหวี่ยงที่ส่วนท้ายที่
1 ไปตามทิศทางของแนวลูกศร ดังรูปที่ 1(ค) เข้าสู่กำแพงอีกและจะเป็นเช่นนี้ไปเรื่อย
ๆ
เหตุการณ์ต่างๆ ที่กล่าวนี้ คือหลักการเดินของหุ่นยนต์ตัวนี้ครับนอกจากนั้นหุ่นยนต์ตัวนี้ยังสามารถเดินเกาะขอบผนังที่ไม่ได้อยู่ในระดับเดียวกันอีกนะครับ
ดังรูปที่ 1(จ) และรูปที่ 1(ฉ) ดังนั้นหากแนวผนังที่มีเส้นทางคดเคี้ยวเป็นเขาวงกต
เจ้าROTOR1 ตัวนี้จะตะลุยแหลกแหกด่านได้สบาย เมื่อพี่ ๆ น้อง
ๆ อ่านมาถึงจุดนี้แล้ว เราลองมาทำของเล่นชิ้นนี้กันเลยดีกว่าครับ
|