หุ่นยนต์เคลื่อนที่อย่างไร จากนิตยสาร
Hobby Electronics ปีที่ 11 ฉบับที่ 124 ต.ค. 2545
เพื่อน
ๆ ทราบหรือไม่ว่าหุ่นยนต์มีลักษณะการเคลื่อนที่อย่างไร ถ้าไม่ทราบผมจะขอไขข้อข้องใจให้กระจ่างกับเพื่อน
ๆ เองครับ ในหลักการทำงาน เราจะต้องงใช้ดวงตาของหุ่นยนต์เป็นแสงอินฟราเรดทำงานเป็นภาคส่งและภาครับจำนวน
2 คู่ ต่อไปเรามาดูการเคลื่อนที่ของเจ้าตัวหัวใจอ่อนไหวกันเลยดีกว่า
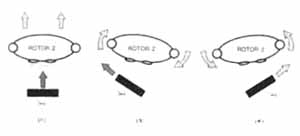
หากมีวัตถุเคลื่อนที่พุ่งเข้าชนตัวหุ่นยนต์ของเราและหุ่นยนต์ตรวจจับได้ก็จะถอยไปด้านหลังทันทีเหมือนเป็นหุ่นยนต์ขึ้ตกใจ
แสดงดังรูปที่ 1 การเคลื่อนที่ของหุ่นยนต์ในรูปที่ 1(ก) และจะถอยหลังต่อไปถ้าวัตถุนั้นยังเคลื่อนที่เข้าไปหาและถ้าวัตถุมีการเคลื่อนที่ไปทางด้านซ้ายหรือขวา
เจ้าตัวหุ่นยนต์จะทำตัวเป็นหุ่นยนต์ขี้สงสัย หันตามวัตถุนั้นอย่างใกล้ชิดและตามติดเสมือนกับเป็นักข่าวหัวเห็ดดังรูปที่
1(ข) และรูปที่ 1 (ค) |