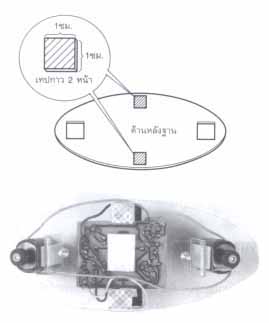
ในรูปที่
5 ส่วนนี้เราจะใช้เทปกาว 2 หน้า ตัดให้มีขนาดกว้าง 1 เซนติเมตร
ยาว 1 เซนติเมตร แล้วนำไปติดบริเวณส่วนใต้ฐานทั้ง 2 ด้าน เพื่อสร้างความสมดุลให้กับฐาน
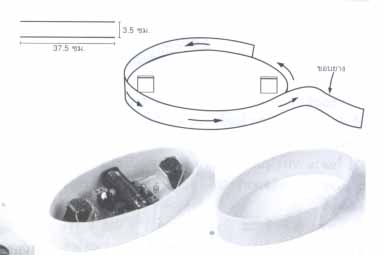
ในรูปที่ 6 ส่วนนี้เราจะใช้แผ่นยางที่มีลักษณะเหมือนโฟมละเอียด
(หาซื้อได้ตามร้านขายเครื่องเขียนทั่วไป) วัดให้มีขนาดกว้าง
3.5 เซนติเมตร ยาว 37.5 เซนติเมตร ตัดตามขนาดแล้วนำไปติดบริเวณโดยรอบขอบฐาน
|